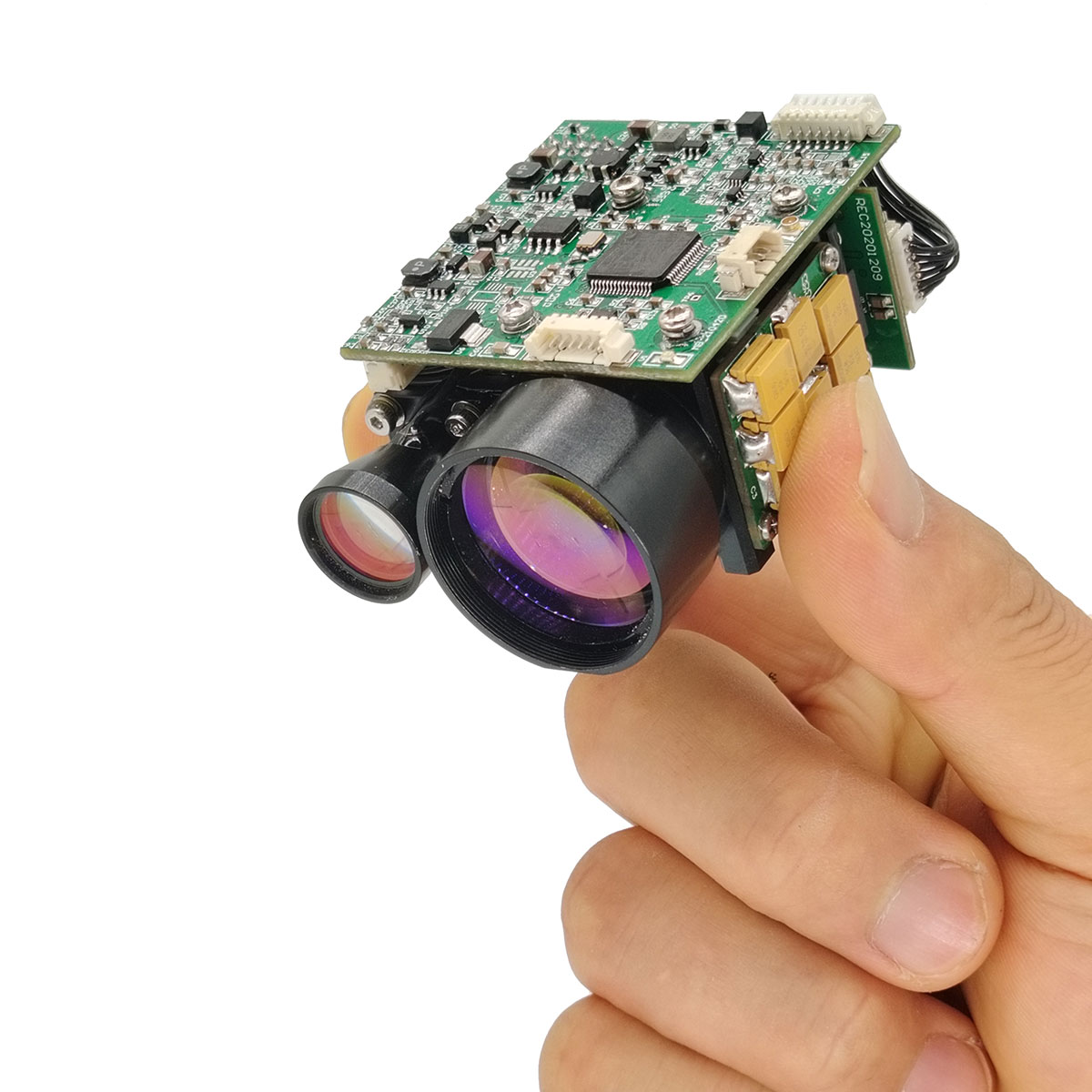
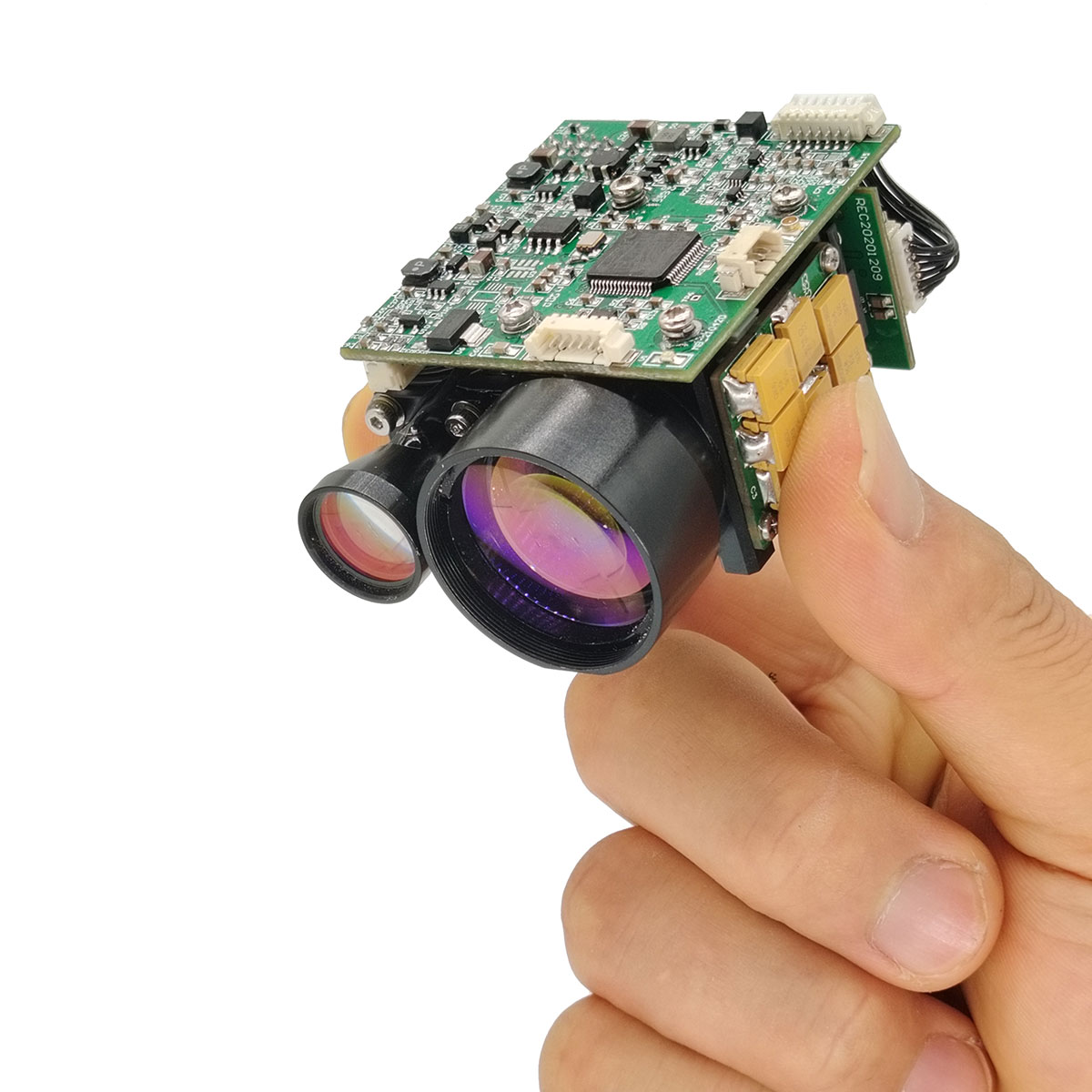
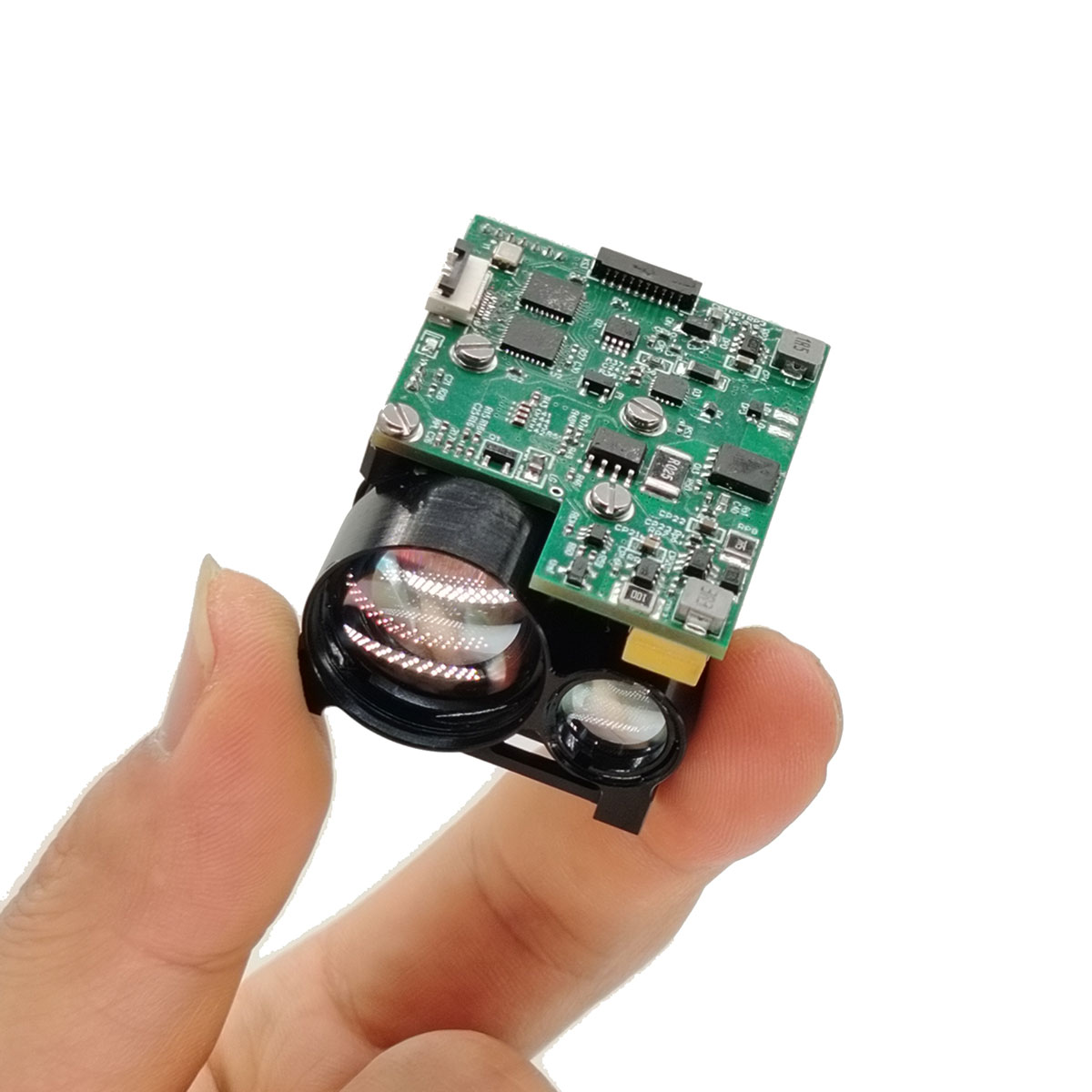
STA-B50X — безпечний для людського ока лазерний модуль вимірювання відстані, який може визначати цільову відстань і передавати виміряну відстань на верхній комп’ютер через послідовний зв’язок. Видимість ≥ 12 км, коефіцієнт відбиття цілі ≥ 0,3, вологість ≤ 80%, відстань автомобіля (мішень НАТО 2,3 м × 2,3 м) ≥ 5 км.
(1) Одиночне вимірювання дальності та безперервне визначення дальності;
(2) Відповідає на команди лазерного вимірювання відстані та може припинити вимірювання відстані в будь-який час відповідно до команди зупинки;
(3) Виводити дані про відстань та інформацію про стан один раз за імпульс під час вимірювання відстані;
(4) Він може повідомляти загальну кількість переданих лазерних імпульсів (без втрати живлення);
(5) Вибір відстані, передня і задня індикація цілі;
(6) Функція самоперевірки.
| Пункт | Технічний параметр | Інструкція |
| Модель | STA-B50X | |
| Робоча довжина хвилі | 1535±5 нм | |
| Безпека очей | Клас 1 (IEC 60825-1) | |
| Приймальна діафрагма | Φ25 мм | |
| Емісійна апертура | Φ10 мм | |
| Можливість вимірювання дальності | 30-8000м | |
| Дальність дії | ≥10000м | МАКСИМАЛЬНА Дальність, коефіцієнт відбиття: 0,9, видимість спостерігача 25 км |
| ≥7000м | Великі будівельні цілі, коефіцієнт відбиття: 0,6, видимість спостерігача 20 км | |
| ≥5000м | мета НАТО | |
| ≥3000м | Людська ціль | |
| ≥1500м | БПЛА ціль | |
| Міні діапазон | 30м | |
| Виявлення кількох цілей | До 3 цілей | |
| Роздільна здатність діапазону | 30м | |
| Точність вимірювання дальності | ±1м | |
| Частота діапазону | 1~10 Гц регульований | |
| Показник точності | ≥98% | |
| Частота помилкових тривог | 1% | |
| Кут розбіжності | ≤0,5 мрад | |
| Інтерфейс зв'язку | RS422 | Інтерфейс TTL/RS232 можна налаштувати |
| Напруга | DC9~32V | |
| Споживана потужність | ≤1,2 Вт (при 1 Гц) | Робоча потужність |
| ≤5 Вт при 12 В | Пікова потужність | |
| 0,1 Вт | Живлення в режимі очікування (підключення POWER-ON) | |
| Стабільність оптичної осі лазера | ≤0,05 мрад | |
| Паралельна помилка | ≤0,3 мрад | Помилка паралельності оптичної осі до опорної точки монтажу |
| Механічний удар | 75 г, 1 мс | |
| Робоча температура | -40℃~+70℃ | |
| Температура зберігання | -55℃~+75℃ | |
| Надійність | MTBF ≥ 1500 год | |
| Розмір | ≤50x32x43,5 мм | |
| вага | ≤75г | |
| Основна функція | Перша і остання цільова дистанція, Багатоцільовий діапазон, Вибірковість відстані |
|
Примітки:
1) розмір цілі НАТО 2,3 м × 2,3 м; Розмір людської мішені 0,5 м × 1,7 м; розмір цілі БПЛА 0,2 м × 0,3 м; Відбивна здатність 30%, вологість ≤80%, видимість спостерігача ≥ 12 км

| шпилька | визначення | пояснити |
| 1 | GND | Рядок |
| 2 | Сила є | Живлення від 3 до 5 В |
| 3 | UART_NC | (порожній) |
| 4 | UART_TX | Передавач послідовного порту, рівень TTL_3.3V |
| 5 | UART_RX | Приймальна сторона послідовного порту з рівнем TTL_3,3 В |
| 6 | POWER_ON | Вимикач живлення модуля, рівень TTL_3.3V; (> 0,7 В увімкнено, <0,15 В вимкнено за замовчуванням) |
| Pin | Визначення | функція | Примітки |
| 1 | RX+ | Приймач RS422 + | Синій |
| 2 | RX- | Приймач RS422 - | Зелений |
| 3 | TX- | Передача RS422 - | Фіолетовий |
| 4 | TX+ | Передача RS422 + | Жовтий |
| 5 | GND | Провід заземлення зв'язку | Білий |
| 6 | VEE | Блок живлення + | Червоний |
| 7 | GND | Джерело живлення - | чорний |
| 8 | PWR EN | / | Ясень |
Модулі діапазону OEM/ODM та індивідуальні рішення
B50X розроблено для системних інтеграторів, які шукають зручне, потужне та компактне лазерне рішення для вимірювання дальності. Він забезпечує надійну роботу в широкому діапазоні застосувань.
Він дуже маленький, надлегкий, має низьке енергоспоживання і може вимірюватися на великій відстані. Він підходить для кишенькових пристроїв (тепловізор), додатків для встановлення зброї, портативних систем і комплектів легких датчиків, а також безпілотних літальних апаратів або UGV.
1. Протокол передачі: асинхронний послідовний зв'язок;
2. Швидкість порту: 115200;
3. Біти даних: 10 біт: один початковий біт, 8 біт даних, один стоп-біт, недійсна перевірка;
4. Структура даних: дані складаються з байта заголовка, частини команди, довжини даних, частини параметрів і контрольного байта;
5. Режим зв’язку: головний контроль надсилає команди керування на машину вимірювання дальності, а машина вимірювання дальності отримує та виконує інструкції. У стані вимірювання дальності машина вимірювання дальності надсилає дані та статус машини вимірювання дальності назад до верхнього комп’ютера відповідно до циклу вимірювання дальності. Формат зв’язку та вміст команд наведено в наступній таблиці.
A) Основні контрольні надсилання
Формат повідомлення, яке буде надіслано, такий:
| STX0 | CMD | LEN | ДАНІ1H | ДАНІ1L | CHK |
Таблиця 2 Опис формату надісланого повідомлення
| номер замовлення | назва | пояснити | код | зауваження |
| 1 | STX0 | Прапор початку повідомлення | A5(H) | |
| 2 | CMD | CW | Дивіться таблицю 3 | |
| 3 | LEN | DL | Кількість усіх байтів, крім позначки початку, командного слова та контрольної суми | |
| 4 | DATAH | параметр | Дивіться таблицю 3 | |
| 5 | ДАНІ | |||
| 6 | CHK | Перевірка XOR | За винятком дійсного байта, усі інші байти обробляються XOR |
Команда описана таким чином:
Таблиця 3 Опис команд і слів даних, надісланих провідним на машину визначення дальності
| номер замовлення | CW | функція | байт даних | зауваження | довжина | Приклад коду |
| 1 | 0x00 | припинити | DATAH=00(H) ДАНІ=00(H) |
Далекомір припиняє вимірювання | Шість байтів | A5 00 02 00 00 A7 |
| 2 | 0x01 | Одинарне ранжування | DATAH=00(H) ДАНІ=00(H) |
Шість байтів | A5 01 02 00 00 A6 | |
| 3 | 0x02 | Безперервне ранжування | DATAH=XX(H) ДАНІ=РР(H) |
DATA описує період діапазону в мс | Шість байтів | A5 02 02 03 E8 4E (діапазон 1 Гц) |
| 4 | 0x03 | самоперевірка | DATAH=00(H) ДАНІ=00(H) |
Шість байтів | A5 03 02 00 00 A4 | |
| 5 | 0x04 | Встановіть найближчу відстань до вибору | DATAH=XX(H) ДАНІ=РР(H) |
DATA описує значення сліпої зони, одиниця вимірювання 1 м | Шість байтів | A5 04 02 00 64 C7 (100 м - найближча відстань) |
| 6 | 0x06 | Сукупна кількість запитів на вихід світла | DATAH=00(H) ДАНІ=00(H) |
Сукупна кількість запитів на вихід світла | Шість байтів | A5 06 02 00 00 A1 |
| 7 | 0x11 | Живлення APD увімкнено | DATAH=00(H) ДАНІ=00(H) |
Шість байтів | A5 11 02 00 00 B6 | |
| 8 | 0x12 | Живлення APD вимкнено | DATAH=00(H) ДАНІ=00(H) |
Шість байтів | A5 12 02 00 00 B5 | |
| 9 | 0xEB | Числовий запит | DATAH=00(H) ДАНІ=00(H) |
Числовий запит | Шість байтів | A5 EB 02 00 00 4C |
a) Основний елемент керування отримує формат
Формат отриманого повідомлення наступний:
| STX0 | CMD | LEN | ДАНІ | ДАНІ0 | CHK |
Таблиця 4 Опис формату отриманих повідомлень
| номер замовлення | назва | пояснити | код | зауваження |
| 1 | STX0 | Прапор початку повідомлення 1 | A5 (H) | |
| 2 | CMD_JG | Командне слово даних | Див. таблицю 5 | |
| 3 | LEN | DL | Кількість усіх байтів, крім позначки початку, командного слова та контрольної суми | |
| 4 | Дн | параметр | Див. таблицю 5 | |
| 5 | D0 | |||
| 6 | CHK | Перевірка XOR | За винятком дійсного байта, усі інші байти обробляються XOR |
Опис стану отримання основного елемента керування:
Таблиця 5 описує слово даних, що надсилається далекоміром головному контролеру
| номер замовлення | CW | функція | байт даних | зауваження | загальна довжина |
| 1 | 0x00 | припинити | D1=00(H) D0=00(H) |
Шість байтів | |
| 2 | 0x03 | самоперевірка | D8 ~ D1 | D8-D7: напруга -5 В, одиниця 0,01 В. D6-D5: значення сліпої зони, одиниця 1 м D4: значення високої напруги APD, одиниці В; D3: тип символу, що вказує на температуру APD, одиниці: градуси Цельсія; D2-D1: напруга +5 В, одиниця 0,01 В |
12 байт |
| 3 | 0x04 | Відстань до найближчого місця доступу, од.м | D1 D0 | DATA описує найближче значення відстані, одиниця вимірювання 1 м; Починайте високо і закінчуйте низько |
Шість байтів |
| 4 | 0x06 | Сукупна кількість запитів на вихід світла | D3~D0 | DATA виражає кількість індикаторів, 4 байти, зі старшим байтом першим | Сім байт |
| 5 | 0x11 | Живлення APD увімкнено | D1=00(H) D0=00(H) |
Живлення APD увімкнено | Шість байтів |
| 6 | 0x12 | Вимкнено живлення APD | D1=00(H) D0=00(H) |
Живлення APD вимкнено | Шість байтів |
| 7 | 0xED | Робота понаднормово | 0x00 0x00 | Лазер знаходиться під робочим захистом від лазера і не може бути виміряний. | Шість байтів |
| 8 | 0xEE | Помилки ефективності | 0x00 0x00 | Шість байтів | |
| 9 | 0XEF | Час очікування зв’язку послідовного порту | 0x00 0x00 | Шість байтів | |
| 10 | 0x01 | Вимірювання однієї відстані (одна ціль, нуль для другої та третьої цілі, нуль для третьої цілі на початку та в кінці цілі) | D9 D8 D7 D6 D5 D4 D3 D2 D1 D0 |
D8-D6 перша цільова відстань (одиниця 0,1 м) D5-D3 відстань до другої цілі (одиниця: 0,1 м) D2-D0 відстань до третьої цілі (одиниця вимірювання 0,1 м) 3. Цілі від близьких до далеких Байт прапора D9 (bit7-bit0): D9 - 7 позиція, що вказує на основну хвилю; 1: основна хвиля є, 0: основної хвилі немає. D9 - 6-та позиція, що вказує на відлуння; 1: відлуння є, 0: відлуння немає D9 П'ята позиція вказує на стан лазера; 1: нормальний лазер, 0: несправність лазера D9 – це четвертий біт прапора тайм-ауту, 1: нормальний, 0: тайм-аут D9 недійсний на 3-й позиції (встановлюється на 1); D9 Друга позиція вказує на статус APD; 1: нормально, 0: помилка D9 є першою позицією, яка вказує, чи є попередня ціль; 1: є попередня ціль, 0: немає попередньої цілі (мішень у сліпій зоні). D9 0-й біт вказує, чи є наступна мета; 1: є наступна ціль, 0: немає наступної цілі (ціль після основної цілі є наступною ціллю) |
14 байт |
| 11 | 0x02 | Безперервне визначення дальності (одна ціль, нуль для другої та третьої цілі, нуль для третьої цілі на початку та в кінці цілі) | D9 D8 D7 D6 D5 D4 D3 D2 D1 D0 |
D8-D6 перша цільова відстань (одиниця 0,1 м) D5-D3 відстань до другої цілі (одиниця: 0,1 м) D2-D0 відстань до третьої цілі (одиниця вимірювання 0,1 м) 3. Цілі від близьких до далеких Байт прапора D9 (bit7-bit0): D9 — 7-й біт для вказівки основної хвилі; 1: основна хвиля є, 0: основної хвилі немає. D9 - 6-та позиція, що вказує на відлуння; 1: відлуння є, 0: відлуння немає D9 П'ята позиція вказує на стан лазера; 1: нормальний лазер, 0: несправність лазера D9 – це четвертий біт прапора тайм-ауту, 1: нормальний, 0: тайм-аут D9 недійсний на 3-й позиції (встановлюється на 1); D9 Друга позиція вказує на стан APD; 1: нормально, 0: помилка D9 є першою позицією, яка вказує, чи є попередня ціль; 1: є попередня ціль, 0: немає попередньої цілі (мішень у сліпій зоні). D9 0-й біт вказує, чи є наступна мета; 1: є наступна ціль, 0: немає наступної цілі (ціль після основної цілі є наступною ціллю) |
14 байт |
| 12 | 0xEB | Числовий запит | D17…… D0 | D17 D16 D15 D14 D13 D12 Повний код моделі машини D11D10 Номер продукту D9 Версія програмного забезпечення D6 D5 D4 Номер APD D3 D2 Лазерне число Версія D1 ПЛІС |
22 байти |
| Примітка: ① Невизначений байт/біт даних, за замовчуванням 0; | |||||
Для отримання додаткової інформації про наші продукти, будь ласка, зв’яжіться з Jioptik.